


















Programmateur de servo USB AGF-SPV3 AGFRC pour servo Programmable AGFRC
Impossible de charger la disponibilité du service de retrait
Carte de programme USB AGFRC AGF-SPV3 utilisée pour le servo AGFRC avec icône ASS. Facile à utiliser et à bricoler le paramètre du servo AGFRC. AGF-SP V3 est une version améliorée de l'AGF-SP V2, il peut être utilisé pour notre servo à grande échelle 1/5 A280BHMW /A280BVSW, notre servo haute tension 4S A86BUMW, ainsi que notre servo d'hélicoptère A80BHM-H /A80BHN-H /A80BHX -H /A80BHP-H. De plus, tous nos servos programmables avec l'icône ASS peuvent cliquer sur la fonction « bande étroite » pour être utilisés comme servo de queue.
REMARQUE : Cette carte de programme est uniquement idéale pour les servos AGFRC avec l'icône ASS ! Le servo AGFRC sans marque d'icône ASS et les autres marques de servo ne sont pas applicables
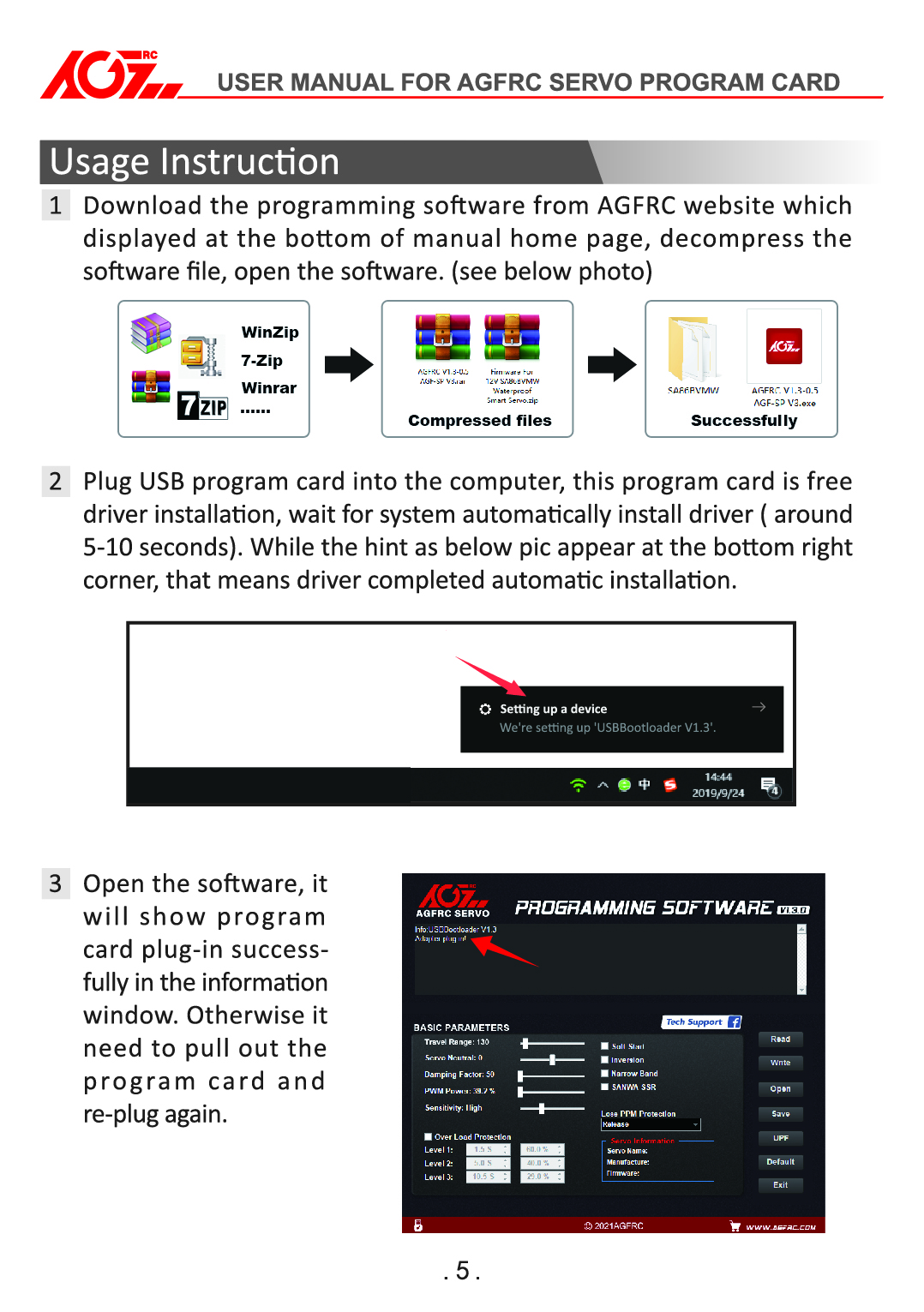
Adresse de téléchargement du logiciel de la carte de programmation USB AGF-SPV3 : Cliquez ici
Configuration système requise
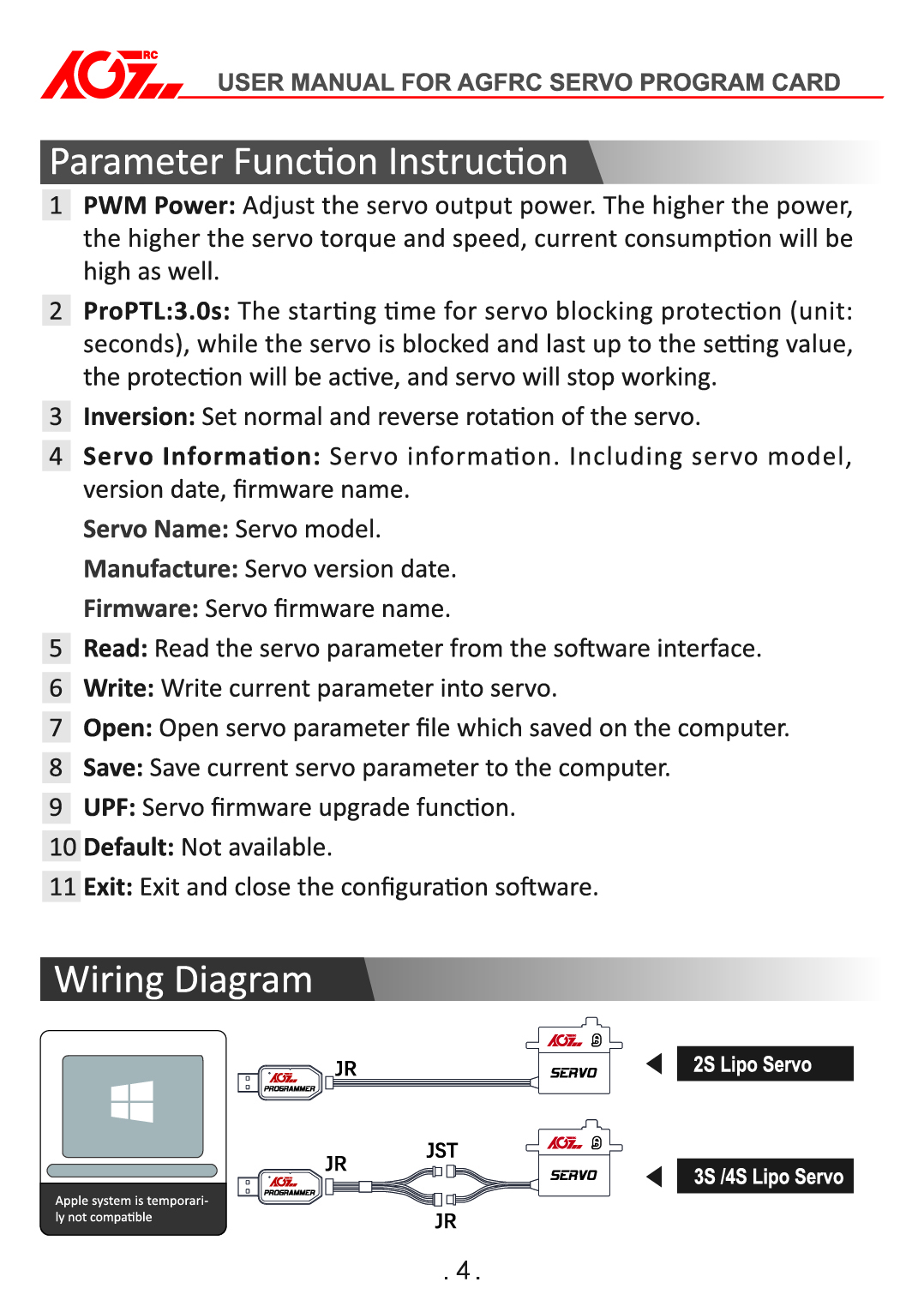
1. Tension de fonctionnement : USB (5 V/500 mA).
2. Système d'exploitation : Windows XP/Windows Vista/Windows 7/Windows 8 /windows10 (32/64 bits).
3. Application : servos programmables AGFrc avec icône ASS  marqué.
marqué.
-
Paramètre Fonction Instruction
1. Angle du servo : définissez l'angle de rotation du servo
2. Servo Neutre : Réglez la position neutre du servo.
Remarque : Pendant que l'émetteur tourne en position neutre, si le servo ne reste pas dans la position correspondante, il peut modifier cette valeur pour ajuster le klaxon du servo. Cela équivaut au découpage du canal de l'émetteur.
3. Puissance PWM : Ajustez la puissance de sortie du servo. Plus la puissance est élevée, plus le couple et la vitesse du servo sont élevés, et la consommation de courant sera également élevée.
4. Facteur d'amortissement : définissez l'amortissement du servo.
5. Sensibilité : Ajustez la bande morte du servo (sensibilité).
6. Démarrage progressif : restauration lente lors de la mise sous tension du servo. Une fois sous tension, le servo se tournera doucement vers la position du signal d'entrée actuel.
Remarque : Cette fonction vise à éviter les dommages dus à un montage incorrect du servo lors de la mise sous tension.
7. Inversion : Réglez la rotation normale et inverse du servo.
8. Bande étroite : mode FUTABA SR
9. SANWA SSR : mode SANWA SSR
Remarque : activez cette fonction, elle peut prendre en charge le mode haute vitesse SANWA SSR. L'angle du servo peut ne pas être précis, il doit être réajusté.
10. Protection PPM perdue : protection contre la perte de signal, il existe trois fonctions de sélection,
un. Libération : Non-Protection
b. Garder la position : restez dans la position avant la perte du signal
c. Aller en position neutre : retour à la position neutre (position 1 500 uS)
11. Protection contre les surcharges : définissez la protection contre le blocage du servo, il y a trois niveaux, cochés pour activer la protection.
Niveau 1 : définissez l'heure de démarrage et la valeur de puissance de la protection primaire.
Niveau 2 : définissez l'heure de démarrage et la valeur de puissance de la protection secondaire.
Niveau 3 : réglez l'heure de démarrage et la valeur de puissance de la protection tertiaire.
Remarque : Le côté gauche sert à définir le temps de démarrage de la protection, le côté droit sert à définir la valeur de la puissance de sortie après
activer la protection de démarrage.
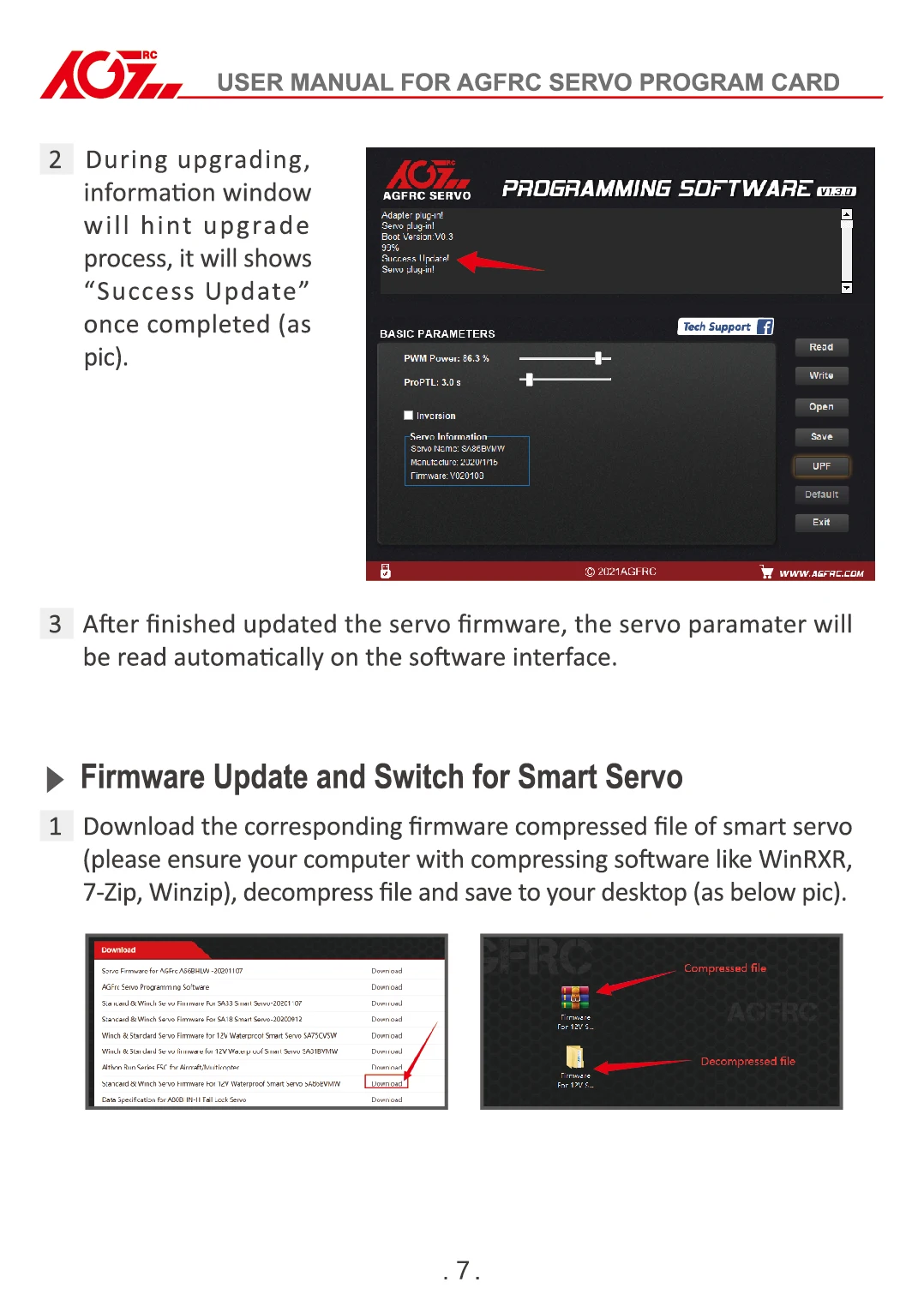
12. Informations sur le servo : informations sur le servo. Y compris le modèle de servo, la date de version, le nom du firmware.
Nom du servo : modèle de servo
Fabrication : Date de version du servo
Micrologiciel : nom du micrologiciel du servo
13. Lire : Lisez le paramètre du servo à partir de l'interface du logiciel.
14. Écrire : Écrire le paramètre actuel dans le servo.
15. Ouvrir : ouvrez le fichier de paramètres du servo enregistré sur l'ordinateur.
16. Enregistrer : enregistrer le paramètre de servo actuel sur l'ordinateur
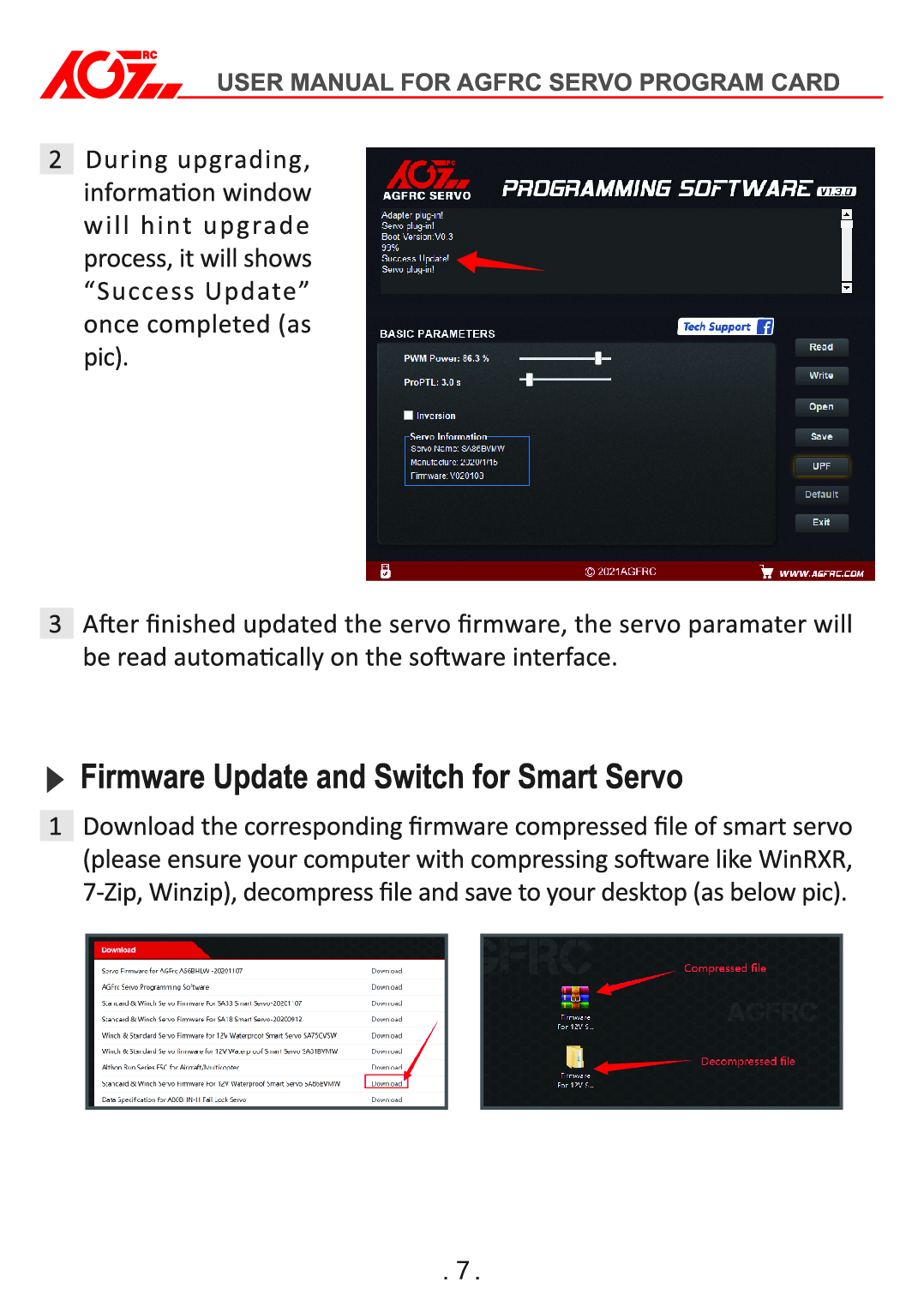
17. UPF : fonction de mise à niveau du micrologiciel du servo.
18. Par défaut : restaurer les paramètres d'usine par défaut.
19. Quitter : Quitter et fermer le logiciel de configuration
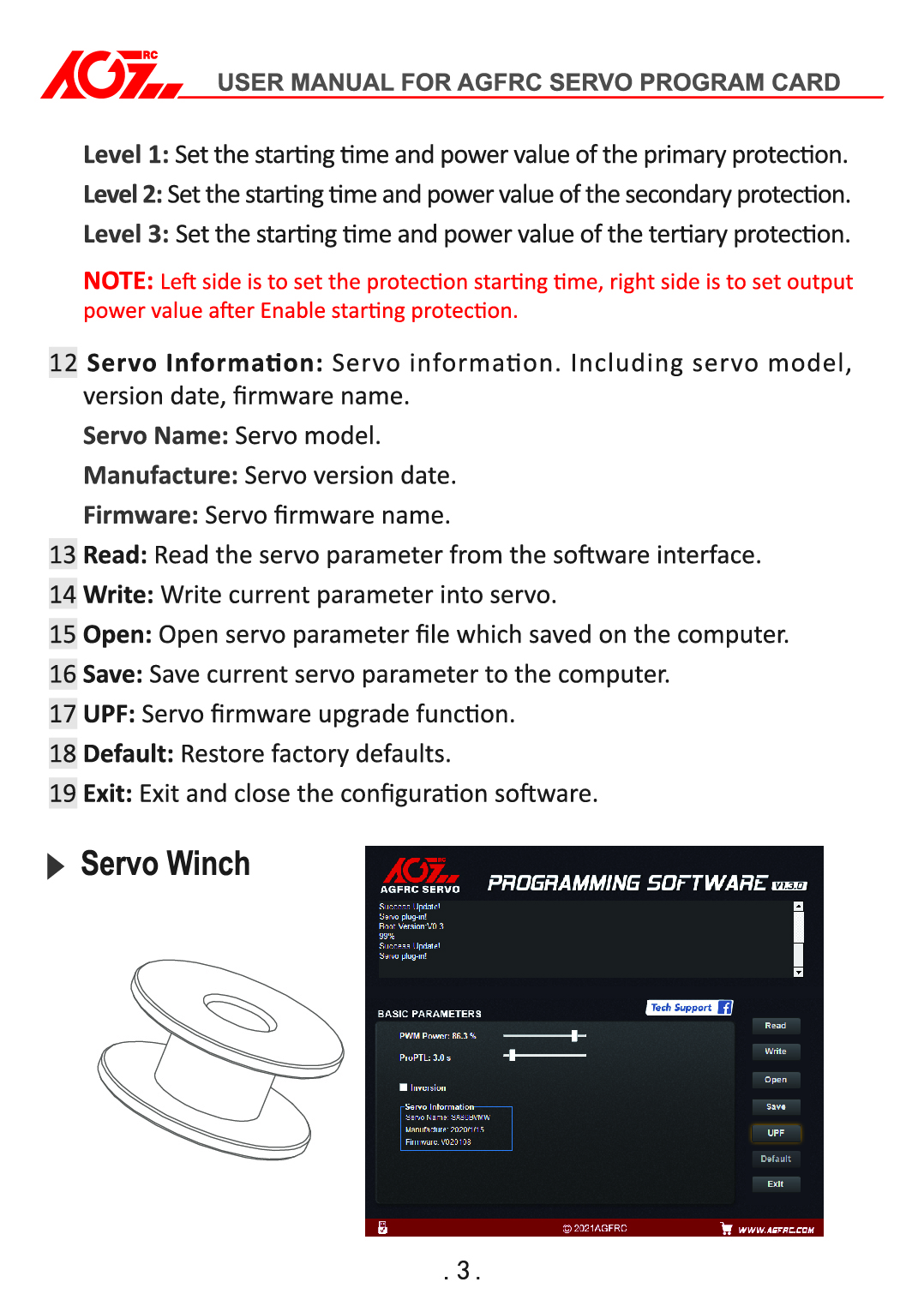
Paramètre Fonction Instruction
1. Puissance PWM : Ajustez la puissance de sortie du servo. Plus la puissance est élevée, plus le couple et la vitesse du servo sont élevés, et la consommation de courant sera également élevée.
2. ProPTL : 3,0 s : Le temps de démarrage de la protection contre le blocage du servo (unité : secondes), pendant que le servo est bloqué et dure jusqu'à la valeur de réglage, la protection sera active et le servo cessera de fonctionner.
3. Inversion : réglez la rotation normale et inverse du servo
4. Informations sur le servo : informations sur le servo. Y compris le modèle de servo, la date de version, le nom du firmware.
Nom du servo : modèle de servo
Fabrication : Date de version du servo
Micrologiciel : nom du micrologiciel du servo
5. Lire : Lisez le paramètre du servo depuis l'interface du logiciel.
6. Écrire : Écrire le paramètre actuel dans le servo.
7. Ouvrir : ouvrez le fichier de paramètres du servo enregistré sur l'ordinateur.
8. Enregistrer : enregistrez le paramètre de servo actuel sur l'ordinateur.
9. UPF : fonction de mise à niveau du micrologiciel du servo.
10. Par défaut : restaurer les paramètres d'usine par défaut.
11. Quitter : Quittez et fermez le logiciel de configuration.
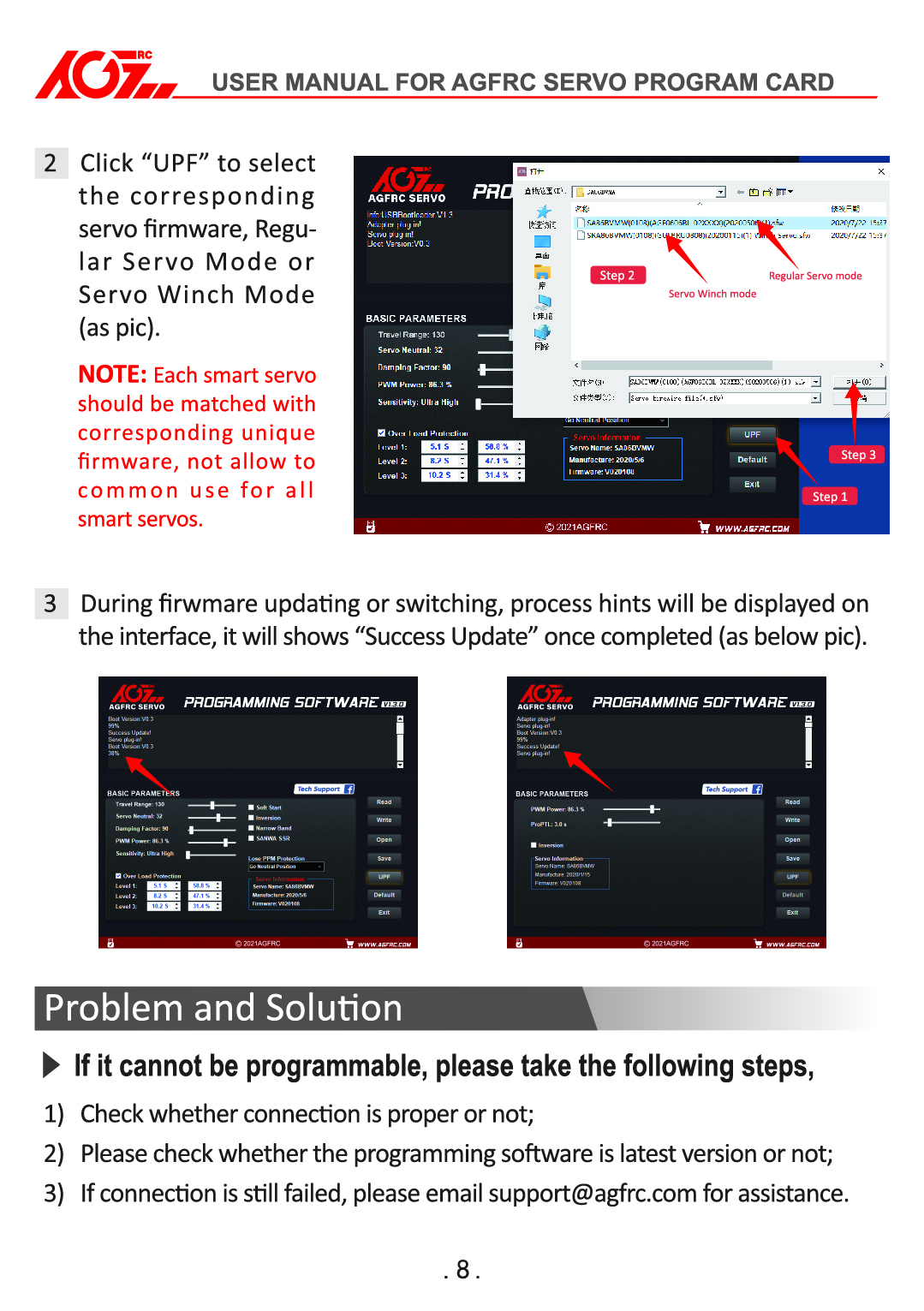
Problème et solution
S'il ne peut pas être programmable, comment inspecter,
1) Vérifiez si la connexion est correcte ou non ;
2) Veuillez vérifier si le logiciel de programmation est la dernière version ou non ;
3) Si la connexion échoue toujours, veuillez envoyer un e-mail à « support@agfrc.com » pour obtenir de l'aide.

